
基于遥操作的触觉通信技术
人类对于外界环境的认识主要依靠“五感”,即听觉、视觉、嗅觉、味觉和触觉。人类在世界中的活动主要可以分为两种:一种是非接触的,如观察、避障等。对于这种方式,大部分的信息是通过视觉辅以听觉来提供的。另一种是接触的,如抓取、敲击物体、挖掘等。此时,触觉是人类判断环境的性状、决定操作方式和力度的最重要的参考信息。
人类出于认识自然和改造自然的需要使各种人类感官信息的通信成为现实。如图1所示。人类在19 世纪发明了电话,从此实现了声音信息的通信。在20 世纪,人类使用摄像机和电视,使视觉的通信成为现实。电话和电视的问世极大地扩展了人类认识自然的活动范围,加速了人类社会的发展。而到了21 世纪,人类还应可以利用机器人实现触觉的传递,使人类对于世界的认识和改造的活动范围不再受到地理距离的限制。
图1 人类感官通信发展历程
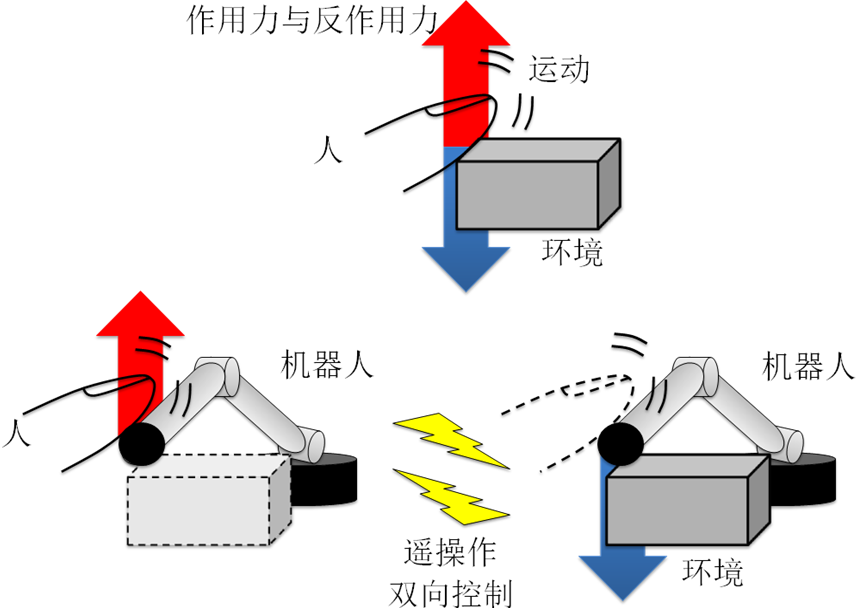
图2 遥操作与触觉通信
在核工业领域,在对具有放射性的燃料棒进行移动或维护的过程中,若在燃料棒与进行作业的人员之间建立起触觉的接口,则作业者在安全的区域内也能够实现有如亲自在燃料棒旁进行作业的感受,提高工作效率。1948 年,美国Arogonne 国家实验室开发了用于核反应堆操作的机械式力矩反馈主-从系统(Mechanical Master-Slave Manipulators,MSM's)开创了这一研究的先河。其后,为解决机械系统传输距离有限,跟踪性能差的物理限制,Arogonne 实验室于1954 年研制了电气式主-从机械臂(Electrical Master-Slave Manipulators,ESM's),操作性能得到很大改善。这一系统开启了现代触觉反馈研究的大门。特别是在2011 年3 月11 日的东日本大地震后,日本福岛第一核电站发生严重的氢气爆炸及核泄漏事故。在事故的善后处理中,远程作业的重要性重新被人们所认识。日本东北大学等科研机构纷纷在原有的研究基础上加强了触觉传递系统的研究,以提高远程遥控作业的工作效率。
图3 Arogonne 实验室机械式力矩反馈系统
在深空探测和深海开发方面,机器人工作在真空的深空环境或高压的深海环境中,而作业的人员则工作在地面上。在作业环境与作业人员之间的触觉传递有助于提高工作效率。20 世纪80-90 年代,随着航天技术的发展,有触觉反馈的遥操作在航天器维修、装配方面渐露头脚。1981 年,加拿大空间局为空间站开发了遥操作系统SSRMS (Space Station Remote Manipulator System)。1993年,欧洲空间局成功应用德国的ROTEX 机器人进行了实验,验证了延迟条件下地面对空间遥操作的可行性。1997 年,日本在ETS-VII 型实验技术卫星上装载了空间机器人,进行了空间遥操作实验。这一时期,美国的NASA 也启动了空间远程机器人项目,希望由远程机器人代替宇航员完成50% 的作业任务。1989年,美国Utah 大学为美国海军开发了具有高保真力反馈的主-从遥操作系统,用以完成多种海底精细作业任务。日本港湾空港技术研究所设计了水下作业工程机械力反馈操作系统。研究显示,利用该技术使水下作业的效率基本达到了陆上作业的水平。
图4 面向空间探测的遥操作系统

图5 有触觉传递功能的水下作业系统
在医疗领域,微创手术(Minimally Invasive Surgery,MIS)吸引了众多研究者的目光。因为这种手术创伤小,患者恢复快,非常有助于提高患者的生存质量。利用触觉通信技术能够实现医生技能的扩展,将患者体内的狭小空间与医生所处的开放空间联系起来,为医生提供有如传统的开放式手术那样的动作范围和触感,从而提高手术的精确度和成功率。2010 年,日本庆应义塾大学成功研制了触觉钳子手术机器人,并通过小鼠肝脏组织剥离实验证实: 该触觉钳子能够实现在医院的楼宇范围内高性能的触觉传递,使医生在远离“患者”的位置也能清晰地感觉到钳子与活体组织间微弱的触感。
图6 日本庆应义塾大学触觉钳子手术机器人
在现代微电子工业、分子生物学研究、纳米材料的开发以及基础医学等领域,微操作任务越来越多,同样迫切需要具有触觉传递功能的微操作机器人的参与。例如在原子力显微镜的操作中,触觉技术可以为操作者提供探针与试样之间的触感,使人们可以在数十至数百纳米量级上高效地作业。
此外,在通信网络发达的今天,人们利用听觉和视觉的通信技术来进行沟通和交流。触觉通信技术将使地球上任意两地的人们可以“握手”交互。在电子商务不断发展的时代,触觉通信技术可以为人们提供一个接口,使人们在听到声音、看到画面的基础上,还能摸到在另一地点的商品的质地,高效率地进行商务活动。
我国的“国家重点基础研究发展计划(973 计划)”的发展纲要中,在信息领域对数字信息理解与融合、和谐人机交互环境等问题进行了有针对性的部署。在“国家高技术研究发展计划(863 计划)”中,已将“临场感遥操作”机器人技术列为关键技术加以研究。此外,国家自然科学基金以及其它省部级基金项目中也有若干这一领域的研究。在国家的大力支持下,东南大学、吉林大学、上海交通大学、北京航空航天大学、哈尔滨工业大学、国防科技大学、中科院沈阳自动化研究所等科研单位纷纷展开了面向触觉的机器人研究。近年来,随着中国空间站计划、“嫦娥”探月计划、“蛟龙”深海潜水器等项目的启动实施,有触觉传递功能的机械臂正逐渐获得更密切的关注。

